SW changes for Flashfloppy source code
https://github.com/kivijakola/flashfloppy
Compiled stm32f105 target files: https://kivijakola.fi/share/gotek_dual_fw.zip
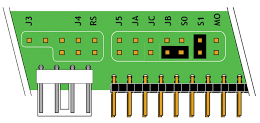
Set jumpers as in the picture. This routes the second flat cable ID pin to uC pin PA2 to drive interrupt. No other HW modifications needed. Speaker that was using same pin cannot be used.
Prepare dual images
Save images in memorystick starting with DSKA* and DSKB*

Edit FF.CFG:
nav-mode = indexedIMG.CFG uses now normal configuration. Example of IMG.CFG:
[hunter]
cyls = 80
heads = 2
tracks = 0-80
secs = 10
bps = 1024
[dos]
cyls = 80
heads = 2
tracks = 0-80
secs = 18
bps = 512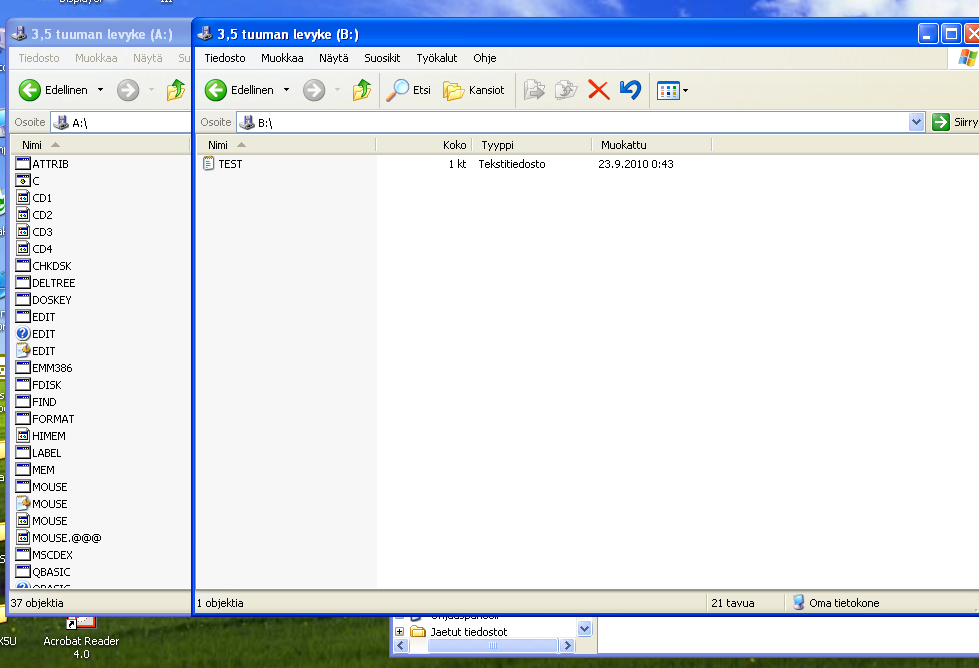
USB Dual image package for Hunter alingment system: https://kivijakola.fi/share/Hunter_dual_image.zip
My Hunter was booting successfully and using both disk drive data from single Gotek emulator.
Some notes:
– Gotek status led is not working for the second select signal as it is hard wired to the first one