1: standard
2: advanced1
3: advanced2
4: semiauto
5: clear by code
6: set by code
>>5
5: clearing by code
Give code
>>1234
Cycle 1234
...
//(c) 2020 Janne Kivijakola
#define IMMO_PIN 2
#define IMMO_PIN_ACTIVE_STATE HIGH
#define PWR_PIN 3
#define PWR_PIN_ACTIVE_STATE HIGH
unsigned long DELAY_TIME = 12500; // 12.5 msec
void setup()
{
Serial.begin(115200);
Serial.print("\n\nStart\n");
pinMode(IMMO_PIN, OUTPUT);
digitalWrite(IMMO_PIN, !IMMO_PIN_ACTIVE_STATE);
pinMode(PWR_PIN, OUTPUT);
digitalWrite(PWR_PIN, !PWR_PIN_ACTIVE_STATE);
}
void loop()
{
char serialByte = 0;
Serial.println("\n1: standard");
Serial.println("2: advanced1");
Serial.println("3: advanced2");
Serial.println("4: semiauto");
Serial.println("5: clear by code");
Serial.println("6: set by code (IMMO emulator)");
Serial.print(">>");
while (serialByte < '0' || serialByte > '6')
{
if (Serial.available() > 0)
{
serialByte = Serial.read();
}
}
Serial.println(serialByte);
switch (serialByte)
{
case '1':
standard();
break;
case '2':
advanced1();
break;
case '3':
advanced2();
break;
case '4':
semiauto();
break;
case '5':
clearbycode();
break;
case '6':
setcode();
break;
}
}
void standard()
{
Serial.println("\n1: standard");
while (Serial.available() > 0)
Serial.read();
process(16, 2, 0, 0, 0);
}
void advanced1()
{
Serial.println("2: advanced1");
while (Serial.available() > 0)
Serial.read();
process(16, 5, 0, 0, 0);
}
void advanced2()
{
Serial.println("3: advanced2");
while (Serial.available() > 0)
Serial.read();
process(48, 6, 0, 0, 0);
}
void semiauto()
{
Serial.println("4: semiauto");
while (Serial.available() > 0)
Serial.read();
process(16, 7, 1, 0, 0);
}
void clearbycode()
{
int code = 472;
Serial.println("5: clearing by code");
code = readInteger();
process(48, 2, 0, code, 0);
}
void setcode()
{
int code = 0;
Serial.println("5: setting code");
while(code<=0)
code = readInteger();
process(48, 2, 0, code, 1);
}
int readInteger()
{
char serialByte = 0;
int receivedBytes = 0;
char serbuffer[10] ={};
Serial.print("Give code\n>>");
while (Serial.available() > 0)
Serial.read();
while (1)
{
if (Serial.available() > 0)
{
serialByte = Serial.read();
if((serialByte >= '0' && serialByte <= '9')||receivedBytes > 4)
{
serbuffer[receivedBytes++] = serialByte;
}
else
break;
}
}
Serial.println(serbuffer);
return atoi(serbuffer);
}
void process(int resetStateBits, int rounds, int mode, int myOwnCode, int setCode)
{
unsigned long delayStart = 0;
int counter = 1;
int bitsRemaining = 0;
int currentRound = 0;
unsigned long pipeline = 0;
int resetStateRemaining = 0;
int dataWidth = 22;
if (mode == 1)
{
dataWidth = 9;
}
if(myOwnCode!=0)
{
counter = myOwnCode;
resetStateRemaining = resetStateBits;
}
delayStart = micros();
while (1)
{
int immoPinState = 0;
if (((micros() - delayStart) >= DELAY_TIME))
{
delayStart += DELAY_TIME;
if (!bitsRemaining)
{
if (Serial.available() > 0)
return;
if (!mode)
bitsRemaining = 32;
else
bitsRemaining = 18;
if (currentRound >= rounds && myOwnCode == 0)
{
counter++;
currentRound = 0;
resetStateRemaining = resetStateBits;
}
unsigned long A=1;
if(setCode==1)
{
A=0;
}
if (!mode)
/*
* IGN __-------------------------------------------------___-------------------------------------------------__
* IMMO__SSS_AIIIBJJJJCKKKKDLLLLE_SSS_AIIIBJJJJCKKKKDLLLLE___SSS_AIIIBJJJJCKKKKDLLLLE_SSS_AIIIBJJJJCKKKKDLLLLE
* round1 round2 round1 round2
* counter1 counter2
* A: Clear code bit
* B,C,D,E: Sync bits
* I,J,K,L: Data bits
* S:
*/
pipeline = A << 19 //A
| ((counter & 0x7000UL) << 4) //III
| (1UL & ~(0x1UL & (counter >> 12))) << 15 //B
| ((counter & 0x0f00) << 3) //JJJJ
| (1 & ~(0x1 & (counter >> 8))) << 10 //C
| ((counter & 0x00f0) << 2) //KKKK
| (1 & ~(0x1 & (counter >> 4))) << 5 //D
| ((counter & 0x000f) << 1) //LLLL
| (1 & ~(0x1 & (counter >> 0))) << 0; //E
else
/*
* IGN __---------------------------------------...___---------------------------------------...
* IMMO__SSS_IIIIIIII_SSS_IIIIIIII_SSS_IIIIIIII_...___SSS_IIIIIIII_SSS_IIIIIIII_SSS_IIIIIIII_...
* round1 round2 round3 round1 round2 round3
* counter1 counter2
*/
pipeline = ((counter + 1) & 0x00ffUL) << 13;//IIIIIIII
if (currentRound == 0)
{
Serial.print("Cycle ");
Serial.print(counter);
Serial.print(" / ");
if (mode == 0)
{
Serial.print("6562");
}
else
{
int code = (counter & 3) + 1
+ 10 * (((counter >> 2) & 3) + 1)
+ 100 * (((counter >> 4) & 3) + 1)
+ 1000 * (((counter >> 6) & 3) + 1);
Serial.print("255");
Serial.print(" code: ");
Serial.print(code);
}
Serial.print("\n");
if ((counter == 6562 && mode == 0)
|| (counter == 255 && mode == 1))
{
Serial.print("DONE\n");
return;
}
}
currentRound++;
}
if (resetStateRemaining)
{
digitalWrite(PWR_PIN, !PWR_PIN_ACTIVE_STATE);
resetStateRemaining--;
}
else
{
//start bits
if (bitsRemaining > dataWidth)
immoPinState = 1;
//data streaming
else
{
immoPinState = (pipeline & 0x100000UL) >> 20;
pipeline <<= 1;
}
if (immoPinState)
{
digitalWrite(IMMO_PIN, IMMO_PIN_ACTIVE_STATE);
}
else
{
digitalWrite(IMMO_PIN, !IMMO_PIN_ACTIVE_STATE);
}
digitalWrite(PWR_PIN, PWR_PIN_ACTIVE_STATE);
bitsRemaining--;
}
}
}
}
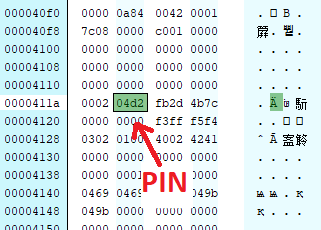 Koodi tallennettuna ECU:n flashiin
Koodi tallennettuna ECU:n flashiin
 Dekoodaussekvenssi
Dekoodaussekvenssi
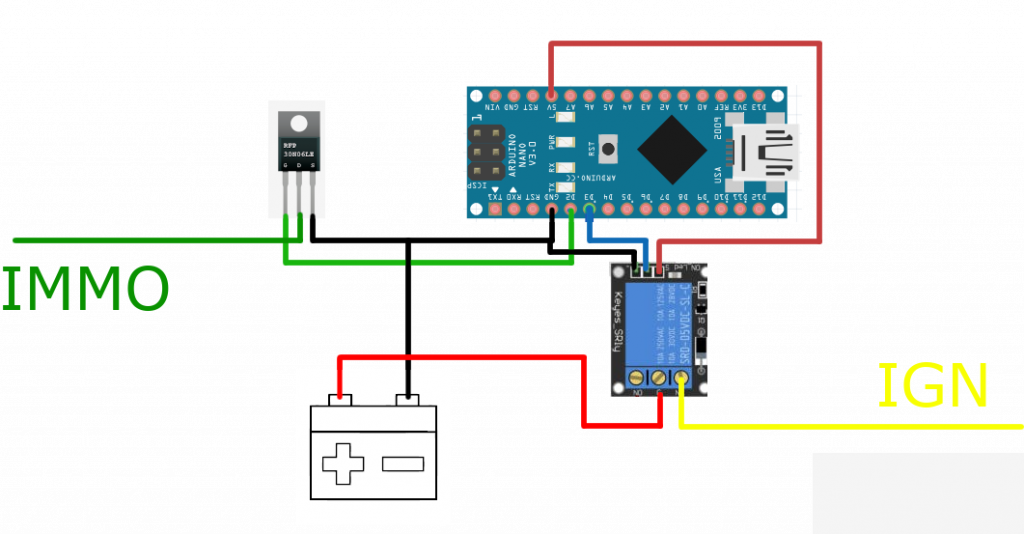
Which transistor do you use on this diagram?
Any nfet with enough voltage rating is good. Or npn. You may even use Arduino drive directly without transistor but signal must be inverted.
so I think that the immo signal is controlled by negative state? Negative = HIGH, N/A = LOW?