
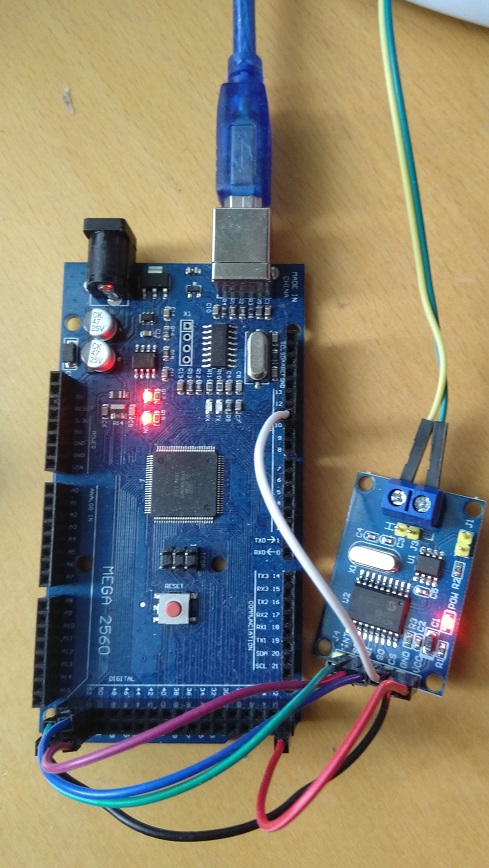
Arduino + MCP2515 CAN bus adapteri

Ohjelma CAN-viestin lähettämiseksi
#include <SPI.h>
#include "mcp_can.h"
const int spiCSPin = 10;
MCP_CAN CAN(spiCSPin);
unsigned char volvoClusterActivate[8] = {0xCC, 0x51, 0xB2, 0x2, 0x80, 0x0, 0x0, 0x0};
void setup()
{
Serial.begin(115200);
while (CAN_OK != CAN.begin(CAN_125KBPS, MCP_8MHz))
{
Serial.println("CAN BUS Init Failed");
delay(100);
}
CAN.init_Mask(0,1,0);
CAN.init_Filt(0,1,0);
CAN.setMode(MODE_LISTENONLY);
Serial.println("CAN BUS Init OK!");
}
void loop()
{
unsigned char len = 0;
unsigned char buf[8];
int incomingSerial = 0;
if(CAN_MSGAVAIL == CAN.checkReceive())
{
CAN.readMsgBuf(&len, buf);
unsigned long canId = CAN.getCanId();
Serial.print("ID: 0x");
Serial.print(canId, HEX);
Serial.print(": ");
for(int i = 0; i<len; i++)
{
Serial.print("0x");
Serial.print(buf[i], HEX);
Serial.print(", ");
}
Serial.println();
}
if (Serial.available() > 0)
{
incomingByte = Serial.read();
if(incomingSerial =='s')
{
CAN.setMode(MODE_NORMAL);
Serial.print("Sending CAN request\n");
CAN.sendMsgBuf(0xFFFFE, CAN_EXTID, 8, volvoClusterActivate);
CAN.setMode(MODE_LISTENONLY);
}
}
}